В останніх версіях прошивки Overlord була додана інформаційна панель яка виводить телеметрію в режимі близького к реальному часу (з невеличкою затримкою задля економії батареї).
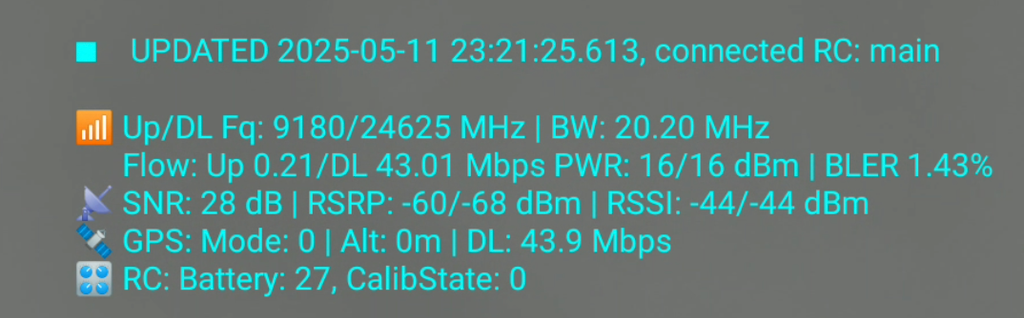
Виглядає вона наступним чином
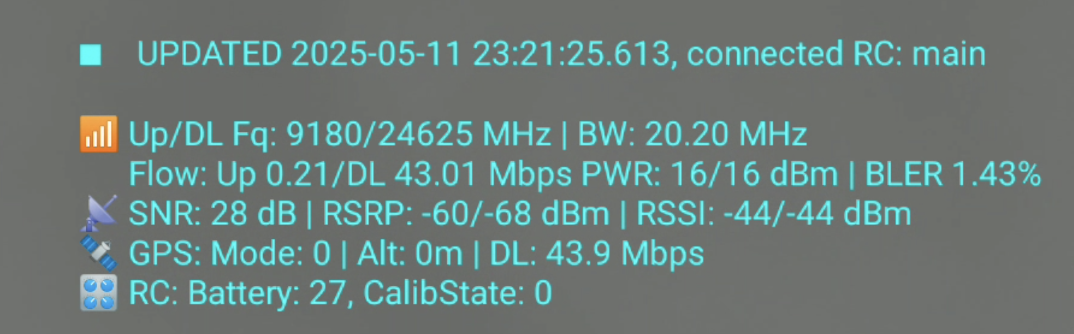
Показник | Опис | Що це означає й навіщо стежити | Орієнтовні «добрі» значення / дії |
Updated at | Час останнього пакета телеметрії | Секунда, коли пульт востаннє отримав валідні дані від дрона. | |
Connected RC | Пульт, з якого йде канал зв’язку | Корисно у режимі dual-control (ретранслятор на щоглі). Бачите ID «Relay» — значить дрон у зв’язку через другий пульт. | Переконуйтесь, що в польоті активний саме той RC, де ви бачите зображення. |
Up/DL Freq | Частоти «пульт → дрон» / «дрон → пульт» | Autel може працювати на різних частотах uplink / downlink (асиметричний duplex). Приклад «918 МГц ↑ / 2,4 ГГц ↓» — пульт шле команди на 918 МГц, зворотнє відео іде на 2,4 ГГц. | Ой не знаю що тут ще сказати) |
BW | Ширина каналу (Band-width) | 20 МГц — повний бітрейт (HD-відео); 10 МГц — стиск до ≈ 10 Мбіт/с; 5 МГц — «аварійний» режим (≈ 4 Мбіт/с). Чим уже канал — тим далі/у «шум» можна пробитись, але відео гірше. | 20 МГц — коли спектр чистий; 10 МГц — компроміс на дистанції > 5 км; 5 МГц — лише щоб «дотягнутися» до борта і посадити. |
Flow Up/DL | Поточний трафік, кбіт/с (Up / Down) | Дивимося, чи відео реально доходить із потрібним бітрейтом. Якщо Down < 4 000 кбіт/с при HD — кадри сипляться. | HD-потік 6 – 12 Мбіт/с; телеметрія — сотні кбіт/с. При просіданні трафіку → міняйте BW або знижуйте роздільність відео. |
PWR | Еквівалентна вихідна потужність модема | До ~200 м Autel тримає фіксовані 16 дБм; далі автоматично піднімає до ≈ 27-34 дБм (600–1 мВт) у межах регламенту. Важливо знати для оцінки ЕМС та вибору LNA. | Якщо PWR тримається максимуму, а SNR падає — антена погано зорієнтована або спектр зашумлений. |
BLER | Block Error Rate, % | Частка помилкових блоків після корекції. 0 % — бездоганний канал; > 5 % — з’являються артефакти відео; > 20 % — можливий «сірий екран». | 0-2 % — ідеально; 3-10 % — робоче, але придивляйтесь; > 15 % — скорочуйте дистанцію або переходьте на іншу частоту. |
SNR | Signal-to-Noise Ratio, дБ | Відношення корисного сигналу до шуму. > 10 дБ — запас; 4-10 дБ — «на межі»; < 3 дБ — лінк критичний. | Тримайте ≥10 дБ. Якщо падає — провірте антену, кабель, огляньте, чи немає РЕБ. |
RSRP | Reference Signal Received Power, дБм | «Чистий» рівень сигналу від дрона в лог-шкалі. –80 дБм кращий, ніж –100 дБм. Враховується при адаптивному виборі модуляції. | –70 … –90 дБм — норма. Гірше –100 дБм — ризик обвалу бітрейту. |
RSSI | Received Signal Strength Indicator, дБм | Загальна потужність у каналі (сигнал + шум). Якщо RSSI кращий, ніж RSRP на 5-10 дБ, значить довкола «чисто»; якщо різниця мала — високий шумовий фон. | Слідкуйте за різницею: RSSI – RSRP ≈ 6-12 дБ — канал «тихий». |
GPS Mode | Режим навігації дрона0 — на землі; 1 — мотори ON; 4 — ATTI; 5 — GNSS; 6 — VPS ON | Розумієте, чи дрон тримається супутників. У GNSS (5) RTH може спрацювати за акумулятором; у ATTI немає позиціонування — керуєте вручну. |