Увага, розділи Нові версії та Питання-Відповідь знаходяться в самому низу документації.
Починаємо роботу
версія 1 від 07.03.2026
Цей розділ містить практичні рекомендації від пілотів, які вже мають досвід польотів з Overlord-прошивкою на EVO Max. Читайте уважно — тут зібрано те, що не завжди очевидно з офіційної документації.
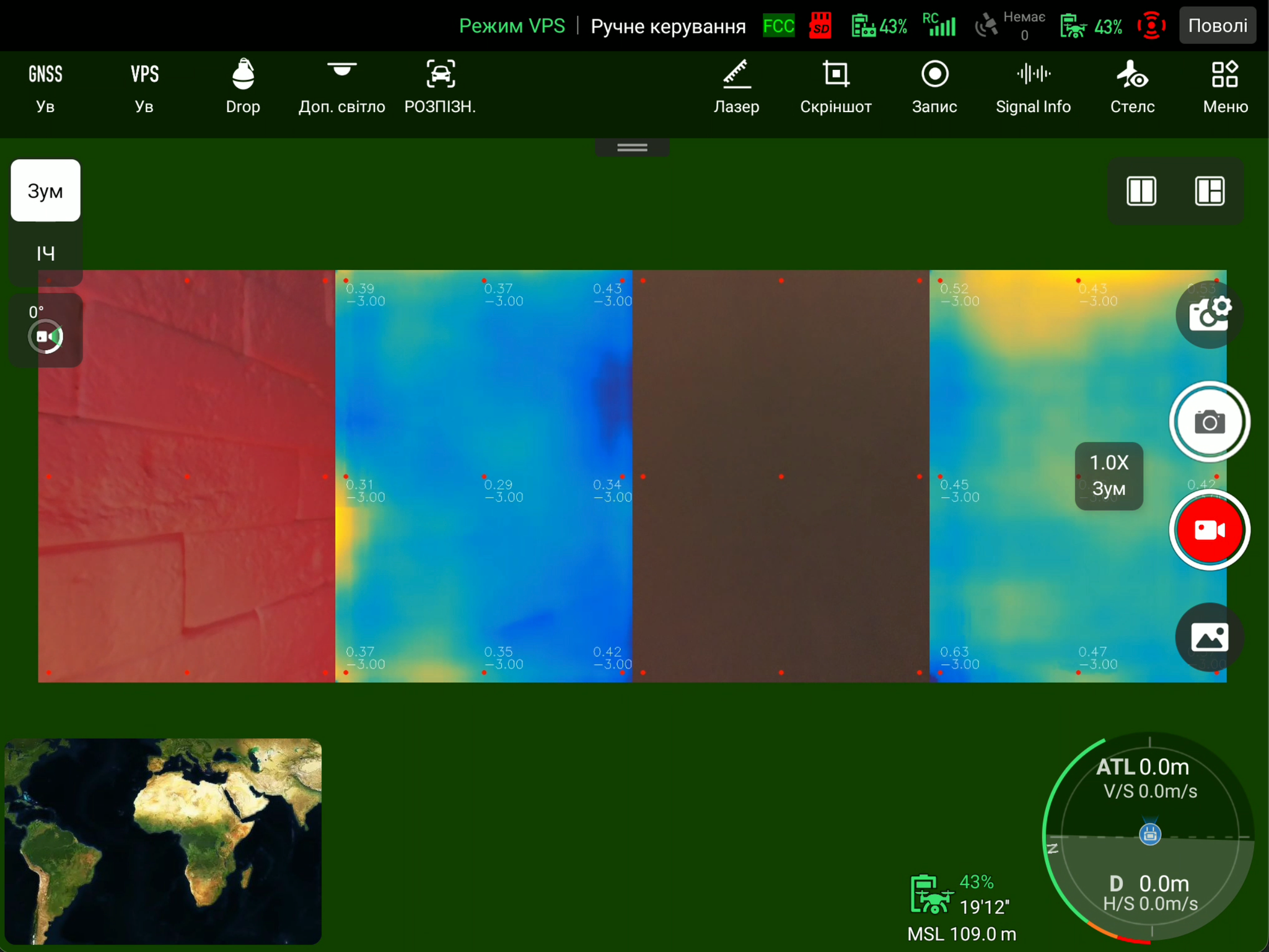
VPS — Система візуального позиціонування
VPS (Visual Positioning System) використовує нижні оптичні камери для визначення положення дрона відносно поверхні. Вмикати чи вимикати її — рішення пілота, залежно від умов.
VPS необхідно вмикати до вильоту. Його основна роль — не утримувати позицію в повітрі без супутників, а запам'ятати маршрут від місця зльоту щоб у разі втрати керування дрон міг самостійно повернутись додому по вже відомому шляху. Якщо VPS втратить позиціонування десь по дорозі — він більше не зможе відновити свій статус до наступного вильоту, оскільки вже «загубився».
Вночі VPS не функціонує — система потребує достатнього освітлення. Вмикати її в темний час доби немає сенсу.
Вдень VPS можна вмикати, якщо вона не заважає виконанню завдання. Однак слід пам'ятати: над однорідними поверхнями (сніг, вода, чисте поле одного кольору) VPS може втрачати орієнтацію або давати хибні дані через відсутність текстурних точок прив'язки. Якщо вся земля вкрита снігом — краще вимкнути.
На відміну від BOOM18 тут VPS і GNSS можна сміливо перемикати в польоті без втрати керування, що дуже розповсюджено було починаючи з прошивок 1.8.2.Х.
Нестабільний стан VPS в польоті
Якщо в статусному рядку (де відображається поточний режим польоту) статус постійно перемикається між «Режим VPS» і «Режим положення (Режим АТТІ)» туди-назад — це сигнал того, що система VPS не справляється з поточними умовами (недостатня текстура, погане освітлення тощо). Такий стан може гальмувати та дестабілізувати дрон. Просто вимкніть VPS і продовжуйте політ.
Відома помилка: розсинхронізація стану VPS
Іноді виникає ситуація, коли на іконці в панелі відображається VPS Off, але в статусному рядку вгорі написано «Режим VPS». Це означає, що дані між інтерфейсом та фактичним станом системи розсинхронізувались. Дрон може в такому випадку самостійно активувати VPS.
Рішення: увімкніть VPS → потім вимкніть VPS → перевірте зміну статусу саме в рядку режиму польоту (не за іконкою). Орієнтуватись потрібно на текстовий рядок режиму, а не на статус іконок.
GNSS (супутники)
GNSS вмикайте тоді, коли впевнені у відсутності спуфінгу.
Орієнтир: дрон коректно відображається на карті в додатку UAV, а супутників у вас більше за 16.
Обов'язково калібруйте компас перед вильотом, якщо є можливість. Якщо почнеться спуфінг або глушіння супутників, а компас не відкалібрований — дрон може повністю дезорієнтуватись.
При появі ознак спуфінгу діяти потрібно швидко: вимкніть GNSS та продовжуйте політ у режимі ATTI (Режим положення). У цьому режимі дрон утримує висоту та орієнтацію за гіроскопом та барометром, але горизонтальне утримання позиції — повністю ручне.
Калібрування
Рекомендується калібрування компаса перед кожним польотом. Калібрування IMU кожні 5 польотів або після вібраційного або ударного впливу, наприклад — падіння БПЛА в кейсі або його доставка на позиції по ґрунтовій дорозі.
Калібрування компаса
Компас відповідає за визначення напрямку польоту дрона — при збитому компасі цілевказання по азимуту будуть некоректними.
Для калібрування: відкрийте меню налаштувань → вкладка «Політ» → пункт «Калібрування компаса» → дотримуйтесь кроків на екрані.
Перед калібруванням увімкніть GNSS. Під час процедури стежте, щоб поруч з дроном не було металевих предметів, смартфонів та магнітів. Не опускайте дрон нижче 1,5 м під час калібрування.
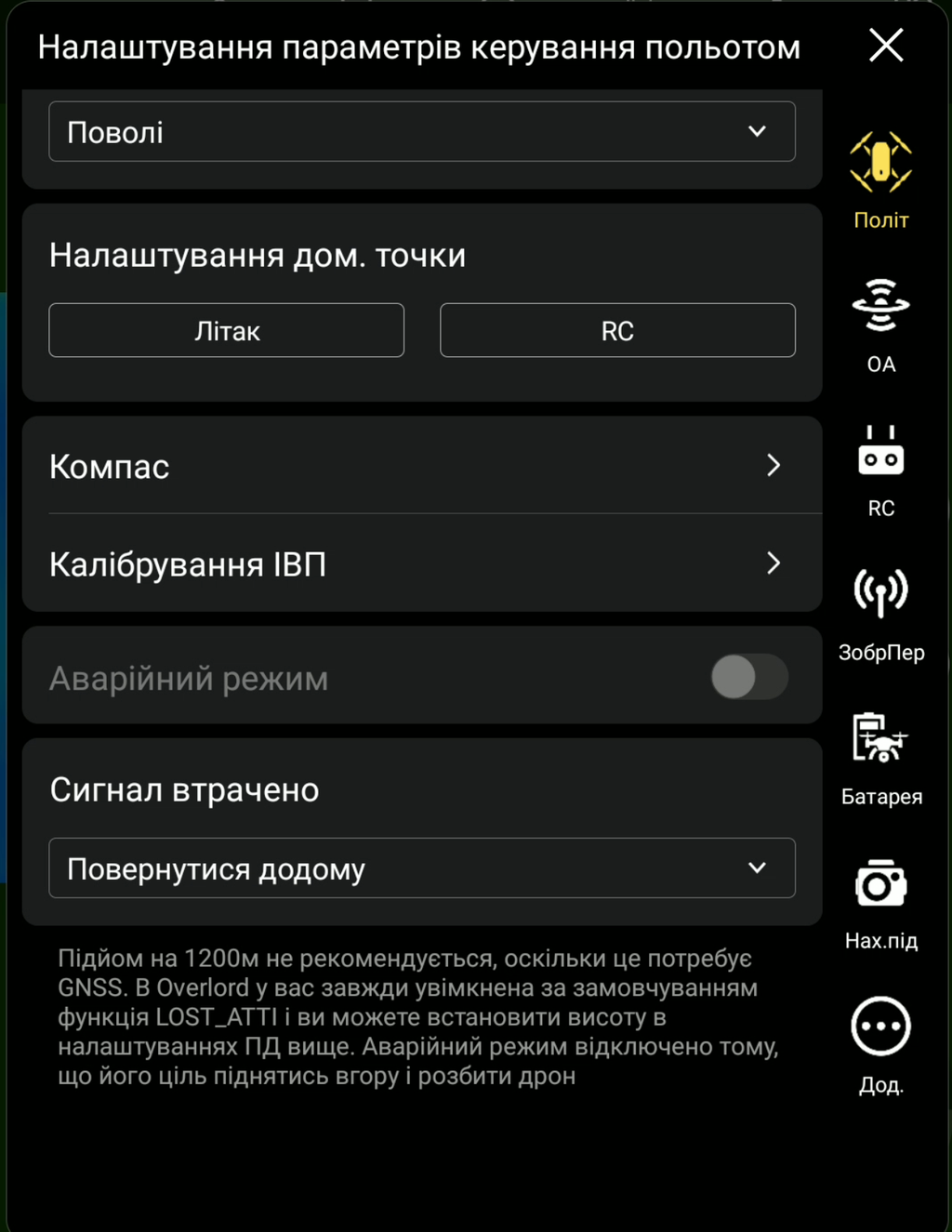
Меню Політ
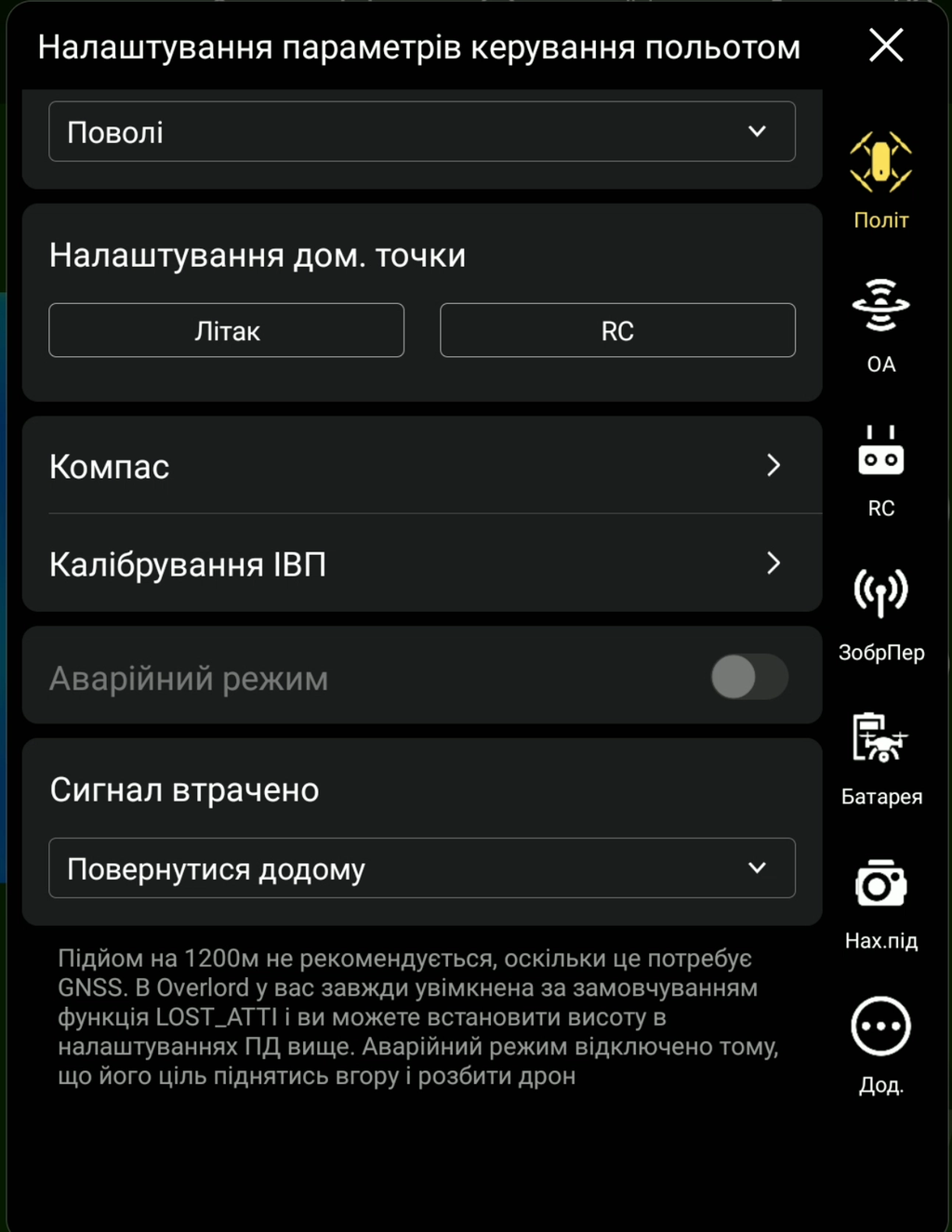
Висота повернення додому (RTH)
Параметр RTH визначає висоту, на яку дрон піднімається перед поверненням додому. Він спрацьовує при втраті зв'язку з пультом, якщо в меню «Втрачений сигнал» обрано режим «Повернення додому». Після 34 секунд відсутності зв'язку дрон активує обраний режим дії. 34 секунди обрано тому, що цього достатньо щоб перезавантажити пульт в польоті і не активувати функцію Втрати сигналу. Модем вмикається раніше за додаток UAV, то ж цього часу досить.
Функція LOST_ATTI
Функція LOST_ATTI*доступна виключно у прошивці Overlord. Вона вмикається, якщо обрано “Повернення додому” як дія при втраті сигналу.
Висота підйому при її спрацюванні конфігурується через той самий параметр RTH. Поведінка залежить від режиму польоту на момент втрати зв'язку:
Якщо є супутники (GNSS режим): дрон піднімається до заданої висоти RTH і повертається до Home Point, якщо він був встановлений.
Якщо режим АТТІ (без супутників): дрон просто починає підніматись до заданої висоти і продовжує набір висоти. Home Point в цьому режимі недоступний.
⚠️ Функція «підйом на 1200 м»
Не плутайте LOST_ATTI з функцією «підйом на 1200 м». Ми не рекомендуємо її вмикати: вона працює лише за наявності супутників, а її практична дія — підняти дрон на критичну висоту, після чого він впаде та розіб'ється. Залишайте її вимкненою.
Також “Аварійний режим” було відключено як функцію, оскільки його функція також підняти і розбити дрон за натиском.
Конфіденційність та безпека даних
Шифрування логів доступне виключно у прошивці Overlord. В інших прошивках бортові логи не шифруються — це реальна загроза: якщо дрон буде збито або знайдено, всі дані польоту будуть доступні тому, хто його підніме. З Overlord — всі бортові логи зашифровані, і якщо дрон буде втрачено, дані в 100% випадків залишаться недоступними для сторонніх.
Важливо щодо очищення логів: ручна очистка логів перед вильотом не вирішує проблему. Очищення відбувається до польоту, але лог поточного польоту завжди записується під час нього. Якщо дрон буде втрачено — останній лог, який містить координати всього маршруту, залишиться на борту. Саме тому шифрування є єдиним надійним захистом, а не очищення.
Remote ID вимкнено. Передача даних на сторонні сервери також вимкнена — прошивка Overlord блокує будь-яку передачу позиції чи телеметрії назовні.
Може виникнути питання: якщо GNSS вимкнено, але дрон все одно відображається на карті в додатку — це нормально. Дрон може отримувати супутниковий сигнал незалежно від того, чи використовує він його для польоту. Відображення на карті відбувається локально в додатку. Оскільки для Autel не існує аналогів AeroScope (систем стеження за дронами), а Overlord закриває канали зовнішньої передачі даних — ця інформація залишається лише у вас.
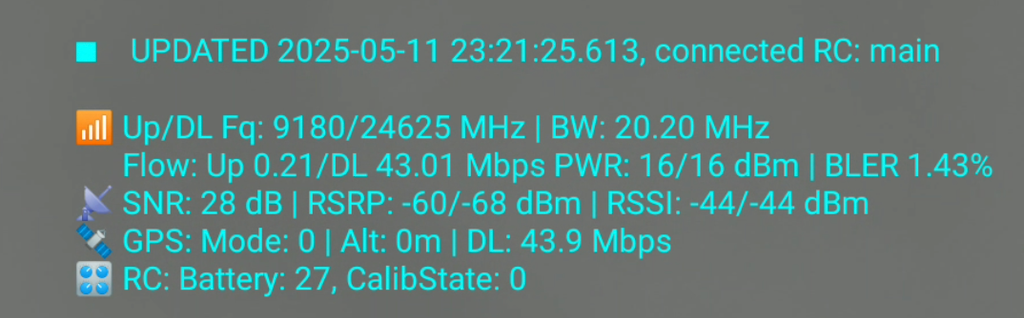
Моніторинг якості сигналу Signal Info
Увімкніть функцію Signal Info, щоб бачити детальні параметри зв'язку в реальному часі. Опис кожного параметра функції — у відповідному пості «Signal Info» нижче в цьому додатку.
Функція корисна в кількох сценаріях:
Тестування антени. Signal Info — основний інструмент для перевірки якості антенного з'єднання. Зміни в показниках одразу видно в динаміці.
Рання діагностика погіршення зв'язку. Параметри Signal Info реагують на зміну умов швидше, ніж індикатор якості сигналу на пульті RC. Зокрема, SNR (Signal-to-Noise Ratio) показує рівень зашумлення/пригнічення сигналу — те, що RC взагалі не відображає. Бітрейт дозволяє побачити, наскільки швидко деградує якість каналу.
Діагностика фрізів картинки. Якщо відеопотік підвисає — перевірте Signal Info: якщо в момент фрізу дрон перемикає частоту, це і є причина фризу. Подальше питання — чому він змінює частоту. Можливі причини: особливості радіочастотного середовища в регіоні, проблема з антеною, або активне пригнічення сигналу (глушіння).
Нижче за посиланням можна ознайомитись з опис кожного з параметрів.
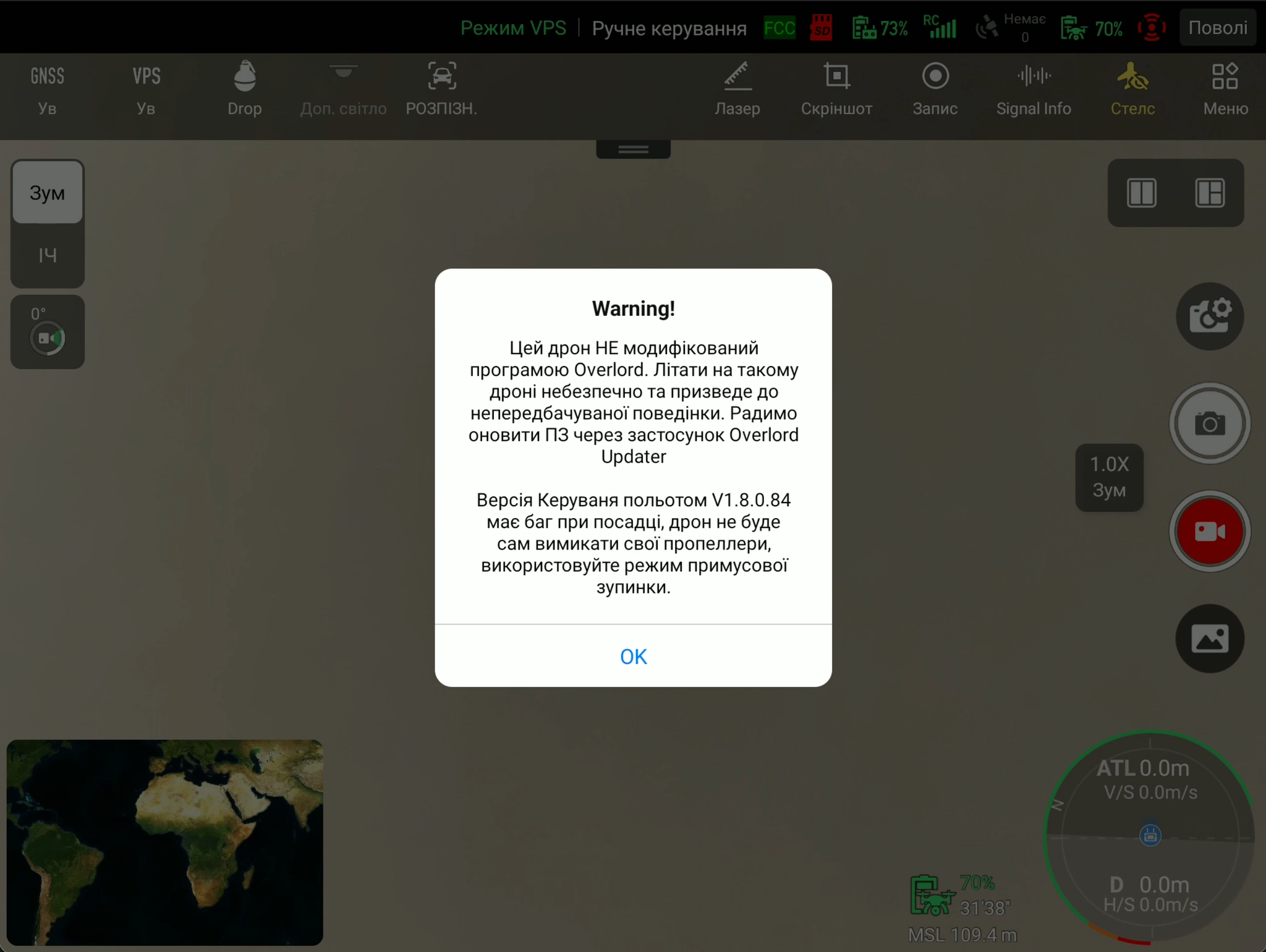
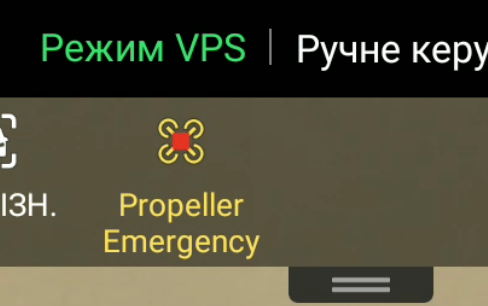
Аварійна зупинка пропеллерів (Propeller Emergency Stop)
Починаючи з версії прошивок 1.9.1.151 та вище для дрону з’явилась проблема, що дрон на посадці не глушить двигуни і постійно підстрибує в повітря.
Швидким рішенням було використовувати аварійну зупинку пропеллерів, але зводити стіки не кожному вдається одночасно і часто дрон просто перевертався. В Overlord є можливість вимкнути двигуни за допомогою функції на С1 або С2 кнопок.
Уважно ознайомтесь із тим, як працює функція аварійної зупинки пропелерів. Це не просто натискання кнопки C1/C2 — для активації цієї функції в польоті також необхідно попередньо увімкнути дозвіл «Propeller Emergency» у налаштуваннях Безпека або на панелі.
Propeller Emergency це свого роду запобіжник, щоб випадково в повітрі не натиснути С кнопку і не впасти.
FPV-камера як резервний вид
FPV Vision FB Switch — перемикає стрім на передню або задню FPV-камеру (Front / Back).
FPV Vision UD Switch — перемикає стрім на верхню або нижню FPV-камеру (Up / Down).
Увімкнення будь-якої з цих функцій замінює стрім із Zoom-камери на відповідний FPV-вид. Щоб повернутись до звичайного режиму — просто вимкніть функцію. Якщо розділити екран, FPV Vision може працювати одночасно з IR та нічною камерами.
Зверніть увагу: картинка з FPV-камер береться з інженерного каналу, тому може відрізнятись від звичайного стріму — зокрема, дублюватись з додатковою обробкою.
Функція найбільш корисна за денного польоту з хорошими умовами освітлення і дає шанс повернути дрон або хоча б направити його в бік точки зльоту при відмові основної камери.
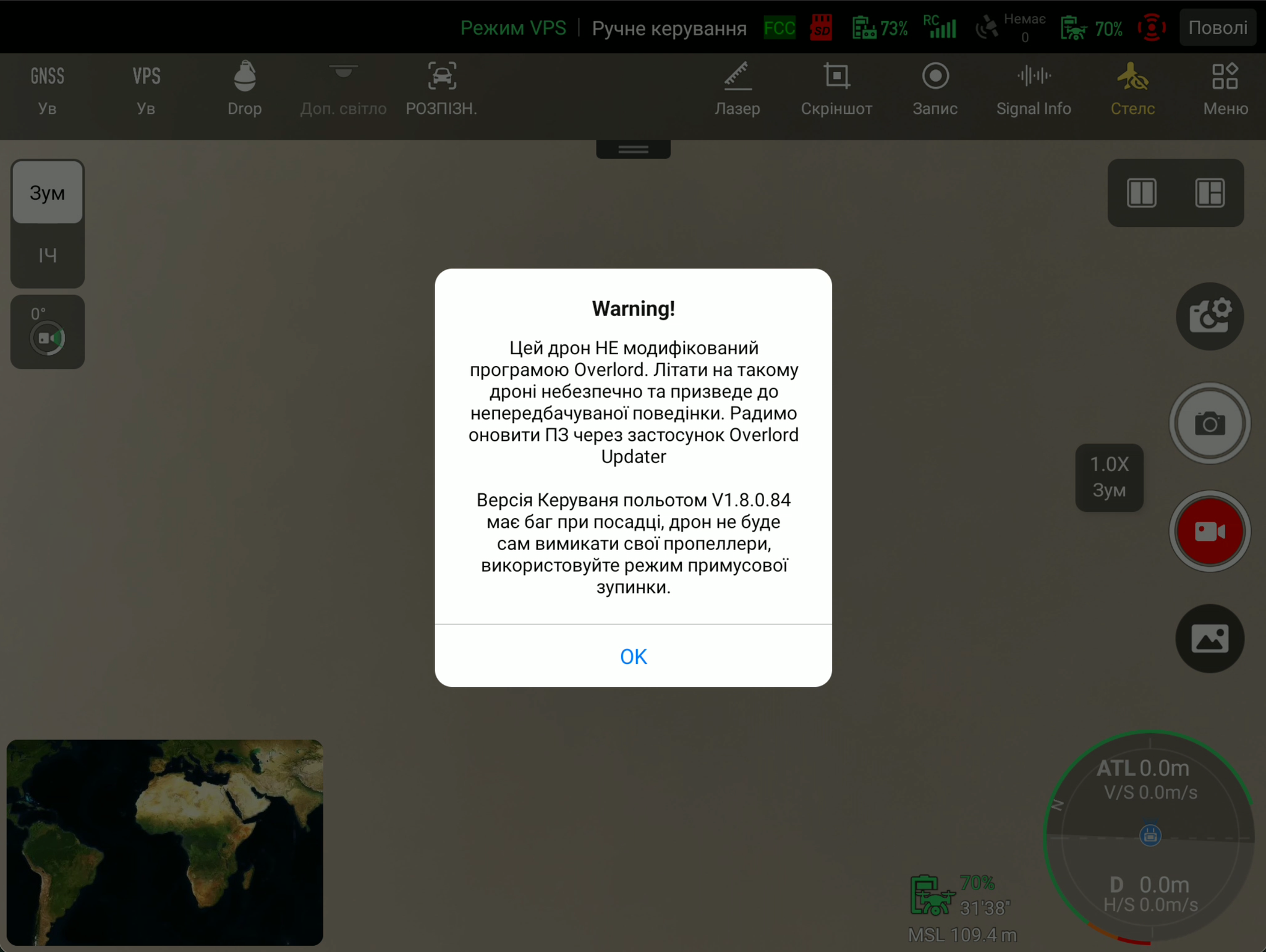
Автоматична перевірка програмного забезпечення на старті
При кожному підключенні нового дрона система автоматично перевіряє наявність прошивки Overlord та сумісність компонентів. В межах однієї сесії польоту повідомлення буде показано лише один раз.
Система інформує оператора про такі стани:
Відсутність прошивки Overlord на дроні— дрон підключено, але Overlord не встановлено.
Застаріла версія прошивки дрона** — рекомендація оновитись.
Баги або проблеми, пов'язані з певними модифікаціями дрона** — несумісні або некоректні зміни компонентів.
Застаріла версія пульта — рекомендація оновити пульт.
Функцію введено через реальну проблему: пілоти підключали не прошиті дрони і не знали про це, бо єдиним способом було визначити прошивку лише знаючи точні цифри версій, що не всі знали і розуміли. В результаті дрон піднімався лише до **120 метрів** і не мав повного функціоналу Overlord. Тепер система одразу сигналізує про таку ситуацію і якщо ви передали пілотам такий дрон, то вони вже це побачать і повідомлять вам про це, або навпаки ви в ролі пілота це отримаєте і будете попереджені про проблему.
Система Пульт-пульт
Підключення
Не потрібно біндити (підключати) дрон до виносного пульта — лише до основного, коли система знаходиться у роз'єднаному стані. Раніше існувала інструкція прив'язувати дрон до обох пультів — це більше не актуально.
Порядок підключення нового дрона: підключіть до основного пульта → зачекайте 30 секунд, щоб нормалізувались усі параметри → увімкніть перехідник. Система запрацює автоматично, без додаткових кроків.
Функція Relay Drone Ignore
Стандартна поведінка при роз'єднанні системи: дрон залишається підключеним до виносного пульта аж до наступного перезавантаження. Функція Relay Drone Ignore змінює цю поведінку — після роз'єднання дрон більше не намагатиметься підключитись до виносного пульта і одразу шукатиме основний. Корисно тоді, коли доступ до виносного пульта обмежений і простіше винести основний пульт назовні та очікувати підключення.
Функція Relay Restart
Функція Relay Restart (раніше окремий додаток Remote RC Reboot, тепер вбудована в додаток UAV) відправляє команду перезавантаження на виносний пульт. Рекомендується перезавантажувати виносний пульт раз на добу — це очищує оперативну пам'ять від процесів, що не вміють самоочищатись, і запобігає зависанням.
Обладнання
Для з'єднання пультів використовуйте перехідник USB-A → RJ-45. Перехідник Type-C → RJ-45 не спрацює — це важливо врахувати при підборі обладнання.
Кабель підійде категорії СAT 5e та вище. Також систему можна організувати через оптоволокно — так само, як будується домашня оптична мережа, що актуально для великих відстаней між пультами або при необхідності зменшити втрати сигналу.
Як обтиснути кабель
Краще використовувати екранований кабель (FTP) — він краще захищений від перешкод. Якщо екранованого немає під рукою, підійде і звичайний неекранований (UTP). Рекомендовані категорії: Cat 6, Cat 6A, Cat 7, Cat 7A (маркування з літерою E також підходить).
Вибір конекторів RJ-45. Правило просте: якщо кабель екранований (FTP) — конектор теж має бути екранований. Якщо кабель неекранований (UTP) — конектор звичайний. Змішувати не варто. Рекомендуємо брати безінструментні конектори RJ-45 — вони обтискаються без спеціального інструменту і значно простіші в роботі в польових умовах.
Пропелери
Використовуйте виключно офіційні пропелери 1158. Жодних інших варіантів.
Пропелери 1136 знято з виробництва самим виробником — у продажу зараз переважно підробки. Встановлення фейкових пропів несе пряму загрозу: неякісний пластик може тріснути в польоті, що з великою вірогідністю призведе до падіння. Якщо бачите 1136 у продажу — не беріть.
Поширені проблеми
В моделях V2 почали складались лапи. Не забувайте використовувати розпорки, кріпіть їх міцно, не лише стяжкою. Є випадки коли ламались навіть розпорки.
Попередження: помилка обертання двигунів. Якщо в інтерфейсі з'явилось повідомлення про «наближення до максимальної межі обертання двигунів» — негайно знижуйте навантаження та зменшуйте швидкість. Причиною може бути перегрів двигуна або тріснутий пропелер або лапа складається. В окремих випадках дрон може різко виконати автоматичну посадку або взагалі втратити тягу. Реагуйте одразу.
Зависла картинка в додатку. Перезавантажте додаток UAV. Якщо не допомогло — перезавантажте пульт. Для перезавантаження пульта є достатньо часу: таймер на активацію функції «Втраченого сигналу» складає 34 секунди після розриву зв'язку.
Регулярне очищення пам'яті попереджує повільну роботу додатку UAV. Налаштування Android → Додатки → UAV → Очистити пам'ять.
Скидання пульта до заводських налаштувань. Якщо пульт лагає і очищення пам'яті не допомагає — виконайте повне скидання: Налаштування Android → Система → Скидання → Очистити всі дані. Прошивка Overlord після скидання залишається на місці і прошивати пульт не потрібно буде. Втрачається лише Вежа та супутні додатки, що ви встановлювали самі — їх потрібно буде встановити повторно.
Інформація про релізи
Нове оновлення для пульту RC Evo Max 1.9.1.185
В попередній версії 1.9.1.184 було допущено помилку щодо системи пульт-пульт, що могло спричинити відсутність підключення або відсутність вікна вибору ролі пульту. В даній версії повернули все на місце і система пульт-пульт працює в штатному режимі як це було зроблено в 1.9.1.183.
Нове оновлення для пульту RC Evo Max 1.9.1.184
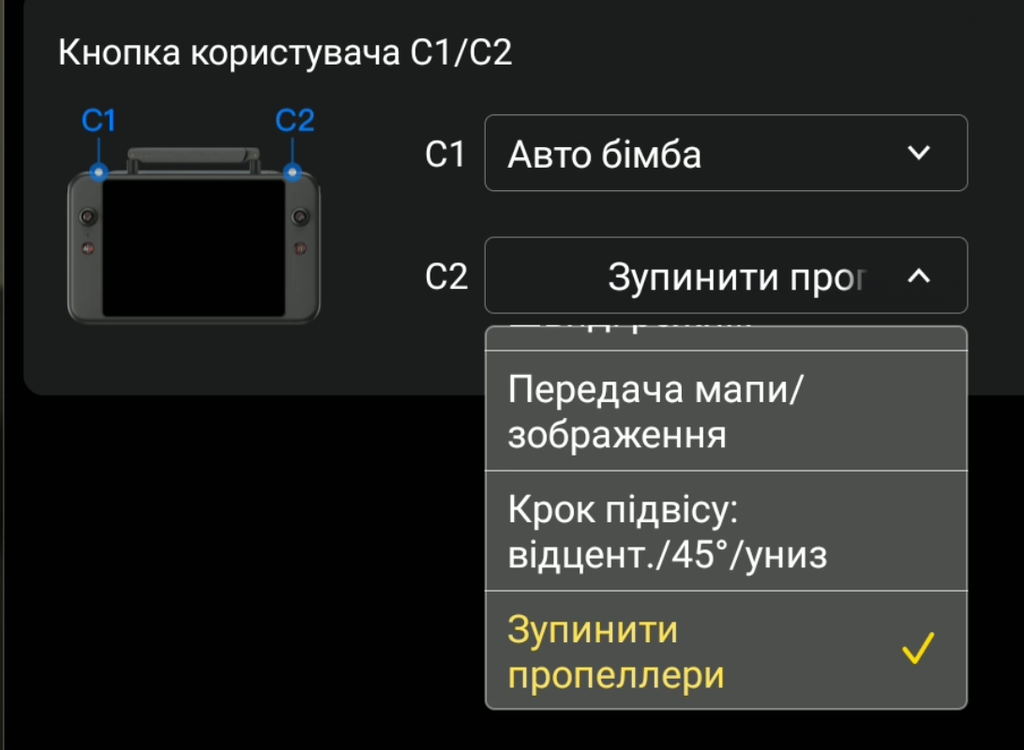
Екстренна зупинка пропеллерів на С1/С2 кнопки
Оскільки пілоти мають проблеми з коректним зведенням стіків для екстренної пропеллерів моторів було додано можливість призначення нової функції на С1 С2 кнопки.
Перед вильотом рекомендується призначити функцію “Зупинити пропеллери” в меню “Кнопки керування пульту” на С1 або С2. При підльоті на посадку потрібно активувати функцію Propeller Emergency іконкою на панелі або в меню Безпека. Натиснувши С кнопку пропеллери зупиняться, що є аналогом зведення стіків.
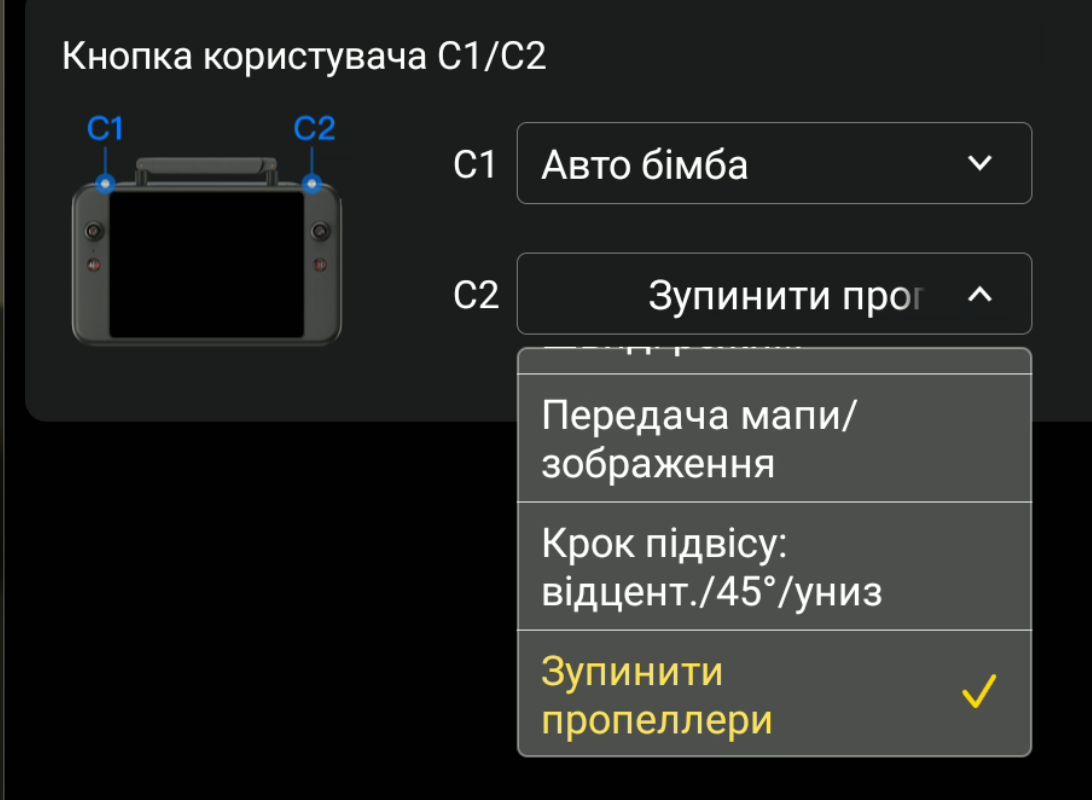
Увага: зупинка спрацює лише якщо Propeller Emergency активовано, це свого роду запобіжник, щоб випадково в повітрі не натиснути С кнопку і не впасти.
Пульт RC Evo Max 1.9.1.183
Автоматична перевірка дрону на старті
Було додано широкий функціонал перевірки дрону на наявність встановленого ПЗ Overlord, на можливі оновлення та сумісність модулів дрону чи наявні в них баги.
Під час впровадження ПЗ Overlord ми часто стикались з проблемою коли пілот чомусь підключав не прошитий дрон. Візуально визначити чи встановлена коректна прошивка можна лише на пульті через брендинг (заставка, логотип, назва додатку), але дрон можна було визначити лише на сторінці Інфо переглянувши Версію ЛА і перевірити, що вона відповідає точно версії Overlord без жодних маркувань.
Беручи такий дрон, нічого не підозрюючи, пілот міг піднятись в повітря без помилки про Заборонені Зони для польоту, але вже під час польоту дрон би не піднявся вище 120м, а також не мав би усього функціоналу Overlord, і зазвичай такий дрон втрачався дуже швидко. І це все навіть не підозрюючи в чому була проблема, адже пульт виглядав прошитим.
То ж було додано автоматичну перевірку нового підключеного дрону на старті застосунку. В межах однієї сесії польоту повідомлення буде показано лише один раз і повториться лише після перезавантаження дрону, нагадуючи що щось все таки не так.
Програма повідомить вас про
Повну відсутність прошивки Overlord дроні
Застарілу версію дрона та пораду оновитись
Баги чи проблеми пов’язані з певними модифікаціями дронів
Застарілу версію пульту та пораду оновитись
Система пульт-пульт
Було виправлено проблему при підключенні системи пульт-пульт
Раніше могло таке ставитись, що вікно вибору ролі пульта було лише на одному пульті або на жодному чи взагалі кожних 15 секунд роз’єднувало і це вимагало втручання постійного. В цій версії виправлена робота цього функціоналу і тепер без жодних додаткових кроків все вмикається.
Не потрібно біндити (підключати) дрон до виносного пульту, а лише до основного, коли система у роз’єднаному стані. Раніше ходила інструкція що дрон потрібно біндити до обох, щоб ця система запрацювала, це вже не актуально. То ж кожен новий дрон підключаємо до основного, чекаємо 30 секунд, щоб нормалізувались всі параметри і тоді вмикаємо перехідник і все запрацює автоматично.
Додано функцію Relay Drone Ignore
Стандартна поведінка при роз’єднанні системи пульт-пульт така, що дрон залишається підключеним до виносного пульту до наступного свого перезавантаження. Функція Relay Drone Ignore дозволяє це змінити.
Увімкнувши цю функцію, при наступному роз’єднанні системи пульт-пульт, дрон вже не зможе підключитись до виносного пульту і буде шукати основний. Це корисно в тих випадках, коли доступ до виносного пульту обмежений і простіше винести назовні основний пульт і очікувати коли дрон його знайде та підключиться.
Перенесено додаток Remote Rc Reboot з робочого столу пульту в додаток UAV як функцію Relay Restart
Функція дозволяє відправити команду перезавантаження на виносний пульт.
Рекомендується час від часу (раз на добу) перезавантажувати виносний пульт для того, щоб система очищувала свою оперативну пам’ять від процесів, що погано вміють самоочищатись та все починає підвисати.
Стрім з FPV камер дрону

Було додано дві функції
FPV Vision FB Switch
та FPV Vision UD Switch
. FB - Front/Back або Перед / Зад
UD - Up / Down або Верх / Низ
Це перший тестовий варіант такого функціоналу, в майбутніх версіях його буде покращено.
Увімкнувши одну з цих функцій, ваш стрім з Zoom камери переключиться на режим FPV.
Ця функція може бути корисною тоді, коли під час польоту у вас зник стрім з гімблу через фізичну поломку камери чи шлейфу, то ж за хороших погодних умов та світла можливо вдасться повернути дрон або хоча б летіти в сторону дому.
Увага! Увімкнення цієї функції заміняє стрім з Зум камери. Вимкнувши її стрім повернеться до нормального режиму. Розділивши екран FPV Vision може працювати одночасно з IR та Night камерами.
Можна помітити що кожна камера дублюється додатковою обробкою картинки, оскільки стрім взято з інженерного каналу.
Додано функцію Propeller Emergency
Ця функція на панелі застосунку UAV є швидким доступом до меню Аварійна зупинка гвинтів в розділі Налаштувань - Безпека. Актуальність цієї функції прийшла нещодавно через відомий, поки що не виправлений баг в модулі Керування польотом, коли на посадці дрон не хоче вимикає свої гвинти вже будучи на землі і через це стрибає. То ж зручно перед посадкою увімкнути цей режим не заходячи в багато налаштувань.
Вимкнено Аварійний режим з меню Політ
Виправлено завантаження логів з пульту
В додатку Overlord Updater V2.4.5 в меню Логи - RC тепер є один додатковий модуль RCTRANSMISSION, який дозволяє краще зрозуміти причину втрати дрону, тепер його можна онлайн буде викачувати на наш сервер для аналізу.
Оновлення застосунків
Видалено Вежа-Центр через її не актуальність
Оновлено Chrome браузер, тепер всі вебсайти відкриваються без проблем
Додано Hovername для відображення поверх стріму тексту.
Оновлено Overlord Updater до v2.4.5

Overlord
Що це таке?
Overlord - це топ прошивка, допишу згодом :)
Чим відрізняються від Boom18?
В той час як Boom18 є лише додатком на пульт (у нас аналог це UAV), він не може ніяк впливати на політ, оскільки додаток ЛИШЕ ПОКАЗУЄ ВІДЕО та дозволяє включити якусь функцію чи конфігурацію в межах дозволеного виробником функціоналу. У випадку boom18 на дроні та пульту встановлена китайська прошивка, що несе за собою ряд наслідків.
Натомість Overlord це окрема кастомізована прошивка дрону та пульту, що має широкий список переваг. Зараз будуть перелічені речі, які є ЛИШЕ в Overlord
Безпека: шифрування логів дрону та закрита передача будь-яких чутливих даних на сторонні сервери на рівні операційної системи. У випадку Boom18 15 останніх вильотів у вас завжди зберігається і при втраті дрона вони потраплять в чужі руки. Там можуть бути всі маршрути польотів. Їх можна чистити, але останній політ завжди буде на дроні.
Одне з найважливіших: виправлена проблема втрати керування при польотах на GNSS/VPS, що змушувало літати всіх в АТТІ лише. То ж на Overlord можна літати на VPS чи GNSS (якщо вмієте працювати зі спуфінгом).
Виправлена проблема зависання картинки через сильне подавлення.
Виправлена проблема збитого часу на 2028-2032 рік, стрім перериватись не буде.
LOST_ATTI: функція підйому в разі втрати сигналу і можливість конфігурації її висоти.
Signal info - можливість дивитись параметри сигналу в модемі і швидше реагувати на зміну обстановки в повітрі.
Автоматична перевірка чи прошитий дрон, а також повідомлення про можливі баги в компонентах дрону.
Зручна аварійна зупинка пропеллерів
Перегляд стріму FPV камер.
Система пульт-пульт без жодних додаткових налаштувань та непотрібних меню, що працює в штатному режимі. Додаткові функції Relay Restart та Relay Drone Ignore. Підключення нового дрону не вимагає бінд до реле, а лише до основного пульту.
Можливість онлайн оновлення на позиції для отримання нового функціоналу. Оновлення повністю безпечне.
Повністю відключено надокучливе повідомлення про повернення додому коли падає заряд батареї. Гімбал тепер не стає в 0 градусів як раніше.
При скиданні до заводських налаштувань прошивка залишається. При підключенні непрошитого пульту до дрону нічого не станеться, все залишиться на місці.
Чого у нас немає натомість?
Опції виставляти довжину часу для функції скиду в режимі Авто.
Опції обирати список частот для роботи в Авто режимі. У нас строго завжди всі 6 частот застосовані, оскільки неодноразово було відтестовано, що алгоритм вибору частоти дрону сам розуміє умови та обирає найкращу з можливих частот. В разі використання Avenger/Roc4-6 (не дуже рекомендовано) дрон буде коректно обирати частоти включаючи 1.4 навіть (сюрприз, ага), що дозволяє йому летіти далі.
Drone Reboot - в цій функції немає сенсу, оскільки вона не перевантажує критичні компоненти дрону, він все ще залишається в повітрі продовжує працювати. Це не панацея, рестарт пульту дає аналогічний результат в більшості випадків. Через хаотичне застосування було прийнято рішення не додавати її. Втрату керування чи неправильний час вона не виправляла.
Як отримати?
Вся взаємодія із прошивкою пультів та дронів проходить через додаток Updater, який створений для оновлення по повітрю.
Актуальна версія - https://shorturl.at/hcFxk
Додаток необхідно встановити на пульт, після цього відкрити та подати заявку на апдейт. Вони розглядаються в напівавтоматичному режимі, тому можливі затримки. Прохання заповнювати деталі по можливості для більш легкої ідентифікації.
Важливо - це безкоштовно і завжди (поки буде існувати проект) буде безкоштовно для ЗСУ.
Важливо - дрон необхідно підʼєднати до пульта до того як заявка буде подаватись, інакше ми створимо прошивку тільки для пульта.
Мені потрібно прошити 10-20-100 комплектів / є ідея / знайшов баг / хочу подякувати за роботу.
Напишіть нам в Діскорді або відповідній групі в Сігналі. Будемо раді допомогти